514 BONES-SEED-SOMA manipulation clips · baselines: MINK-EF (EEF-only), MINK-TE (+torso/elbow), SEW-M · lower is better, bold = best, underline = second.
| Method | JL | Tracking error ↓ | Feasibility ↓ | Solver variation ↓ | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Palm mm |
P95 mm |
Ori. deg |
Torso frac. |
Limit frac. |
Coll. frac. |
NNAD — |
PCA eig. |
RMS deg |
||
| SEW-M | off | 178.979 | 201.056 | 7.89e-6 | 0.000 | 0.0126 | 0.243 | 0.488 | 1.20e-25 | 6.83e-14 |
| MINK-EF | off | 0.701 | 1.853 | 0.0107 | 0.625 | 0.1610 | 0.977 | 0.368 | 173.49 | 3.117 |
| MINK-TE | off | 18.557 | 73.980 | 0.157 | 0.027 | 0.0852 | 0.640 | 1.026 | 1119.11 | 6.106 |
| WARP | off | 0.0046 | 0.046 | 8.74e-6 | 0.000 | 0.0047 | 0.163 | 0.289 | 1.14e-25 | 6.66e-14 |
| SEW-M | on | 215.641 | 272.842 | 6.304 | 0.162 | 0.0131 | 0.084 | 0.442 | 1.09e-25 | 6.56e-14 |
| MINK-EF | on | 0.751 | 2.478 | 0.0112 | 0.611 | 0.1247 | 0.222 | 0.354 | 227.29 | 3.169 |
| MINK-TE | on | 19.492 | 69.345 | 0.188 | 0.049 | 0.0420 | 0.478 | 0.454 | 613.47 | 4.964 |
| WARP | on | 24.048 | 82.036 | 3.259 | 0.130 | 0.0060 | 0.017 | 0.266 | 1.06e-25 | 6.46e-14 |
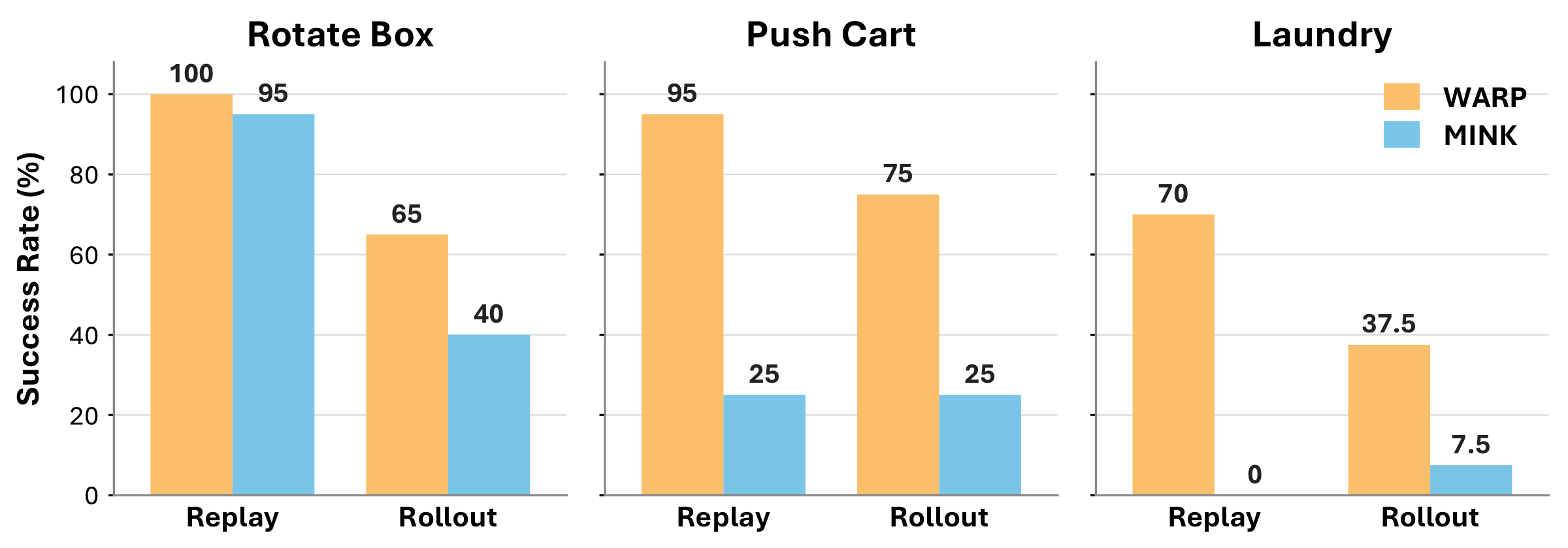
WARP cuts palm error >150× vs MINK-EF at machine-precision orientation, violates joint limits and self-collides the least, is orders of magnitude more consistent, and solves ~30× faster (an hour vs a day for SEED).
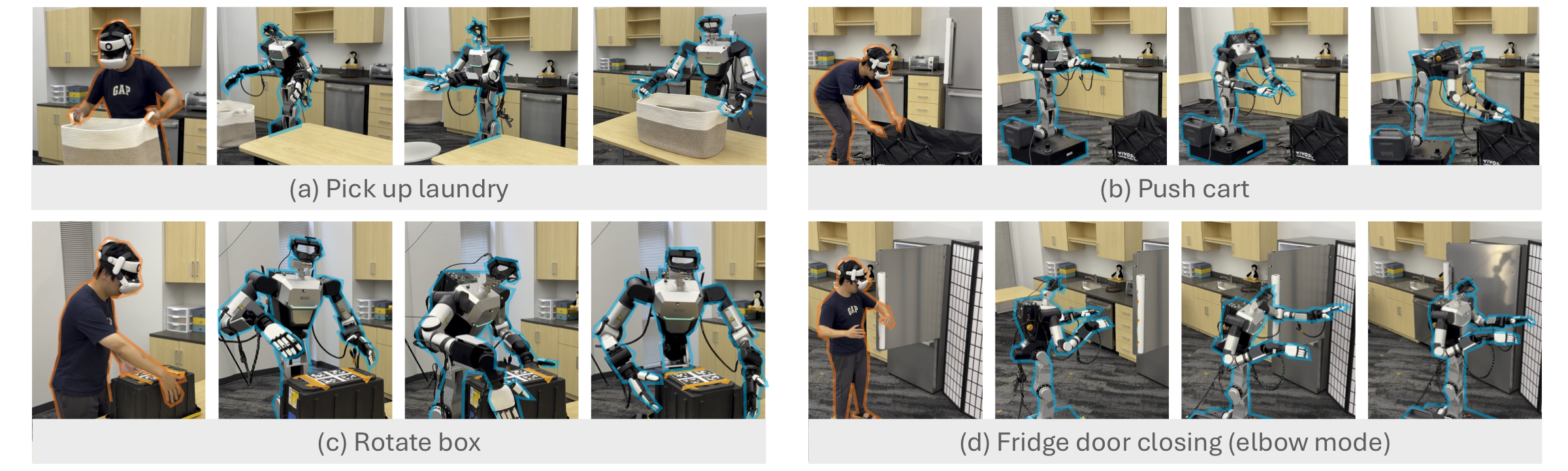
Retargeting the same human clip with each method. Left to right: Human input, WARP (ours), SEW-M, MINK-EF, MINK-TE.